机器人基础知识
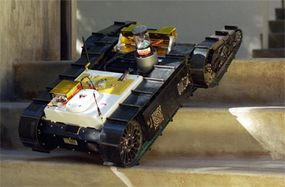
绝大多数机器人都有一些共同的品质。首先,几乎所有的机器人都有一个可移动的身体。有些只有机动车轮,有些则有几十个可移动的部件,通常由金属或塑料制成。就像你身体里的骨头一样,每个部分都是连接在一起的关节.
机器人旋转轮子和枢轴连接部分致动器.一些机器人使用电动马达和螺线管致动器;一些使用液压系统;还有一些使用气动系统(由压缩气体驱动的系统)。机器人可以使用所有这些类型的驱动器。
广告
机器人需要一个动力源来驱动这些驱动器。大多数机器人要么有电池或者把插头插在墙上。液压机器人还需要一个泵来给液压流体加压,而气动机器人需要一个空气压缩机或压缩空气罐。
执行器都连接到电路.该电路直接为电机和螺线管提供动力,并通过操纵电气来激活液压系统阀门.阀门决定了加压流体通过机器的路径。例如,要移动液压腿,机器人的控制器将打开从流体泵到活塞式液压缸绑在那条腿上。加压的液体会使活塞伸长,使腿向前旋转。通常,为了在两个方向上移动它们的部分,机器人使用可以双向推动的活塞。
机器人的计算机控制着与电路相连的一切。为了移动机器人,计算机打开所有必要的马达和阀门。大多数的机器人可重复编程的——要改变机器人的行为,你只需给它的电脑写一个新程序。
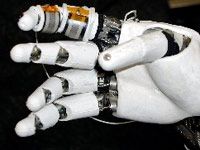
并不是所有的机器人都有感官系统,很少有机器人有视觉、听觉、嗅觉或味觉的能力。机器人最常见的感觉是运动感——机器人监控自己动作的能力。标准的设计是在机器人的关节处安装有开槽的轮子。一个领导在轮子的一边将一束光通过插槽照射到轮子另一边的光传感器。当机器人移动一个特定的关节时,开槽轮就会转动。当轮子旋转时,凹槽会破坏光束。光传感器读取闪烁光的模式并将数据传输到计算机。计算机可以根据这种模式准确地判断关节旋转了多远。这是用在电脑鼠标.
这些是机器人技术的基本细节。机器人专家可以用无数种方式组合这些元素,创造出无限复杂的机器人。在下一节中,我们将看看最受欢迎的设计之一,机械臂。